Light Curve Tool for Small Bodies
How does this work?
Introduction
This application is specifically designed to generate light curves for small, atmosphere-less bodies in the Solar System, with the primary objective of supporting research in this domain. While alternative tools exist, this application offers a distinctive combination of features: simulations are executed directly on the server, eliminating the need for local installation, and it generates projected images of objects in the sky plane. These functionalities are particularly valuable for validating research in fields such as stellar occultations. Developed in Python with Django as its framework, the tool currently provides two operational modes specifically designed for photometric studies of rotational lightcurves—the Known and Generic modes—as well as an additional Occultation mode for stellar occultations.
- Known Body Mode: Allows users to generate the light curve and projected shape of a known object by entering its Minor Planet designation and observation date.
- Generic Body Mode: Enables users to perform generic simulations of an object by specifying its aspect angle.
- Occultation Mode: Computes the projected silhouette of a body at the epoch of a predicted stellar occultation, allowing direct comparison with observed chords.
In all modes, users have the option to upload a custom shape model in .obj format
or define
the triaxial axes (a, b, and c) of an ellipsoid. Both the shape model
dimensions
and the axes are assumed in kilometers.
The following sections provide a detailed explanation of each tool's features.
A complete description of the tool, including usage examples and
validation tests,
is available in the accompanying research paper:
Rizos et al. (2025),
Astronomy & Astrophysics.
Rotational Lightcurves
Known Body Mode
Object: In this mode, the user is required to provide the Minor Planet number assigned to the object. This information can be retrieved from the JPL Small-Body Database.
Date: The user must also specify the observation date from which the light
curve should be
simulated. The required format is
yyyy-mm-dd hh:mm:ss.ssss (e.g., 2001-01-01 12:30:12.4320). If the date
provided is
in the
yyyy-mm-dd format, the tool will automatically assume the time to be
00:00:00.0000.
The viewing geometry is fixed to the date specified by the user,
independent of the rotation period length. In extreme cases where the period is so long
that the geometry changes significantly over a single rotation,
we recommend using the Generic Mode (described below)
and adapting the settings to the specific problem.
Rotation Pole: For known bodies, the rotation pole must be specified in
ecliptic
coordinates, using decimal degrees.
Longitude is defined in the range 0–360°, and latitude in the range
–90° to +90°.
If the pole coordinates are known in a different reference frame, you can convert them using
this external
tool. Once
defined, the rotation sense follows the right-hand rule.
Generic Body Mode
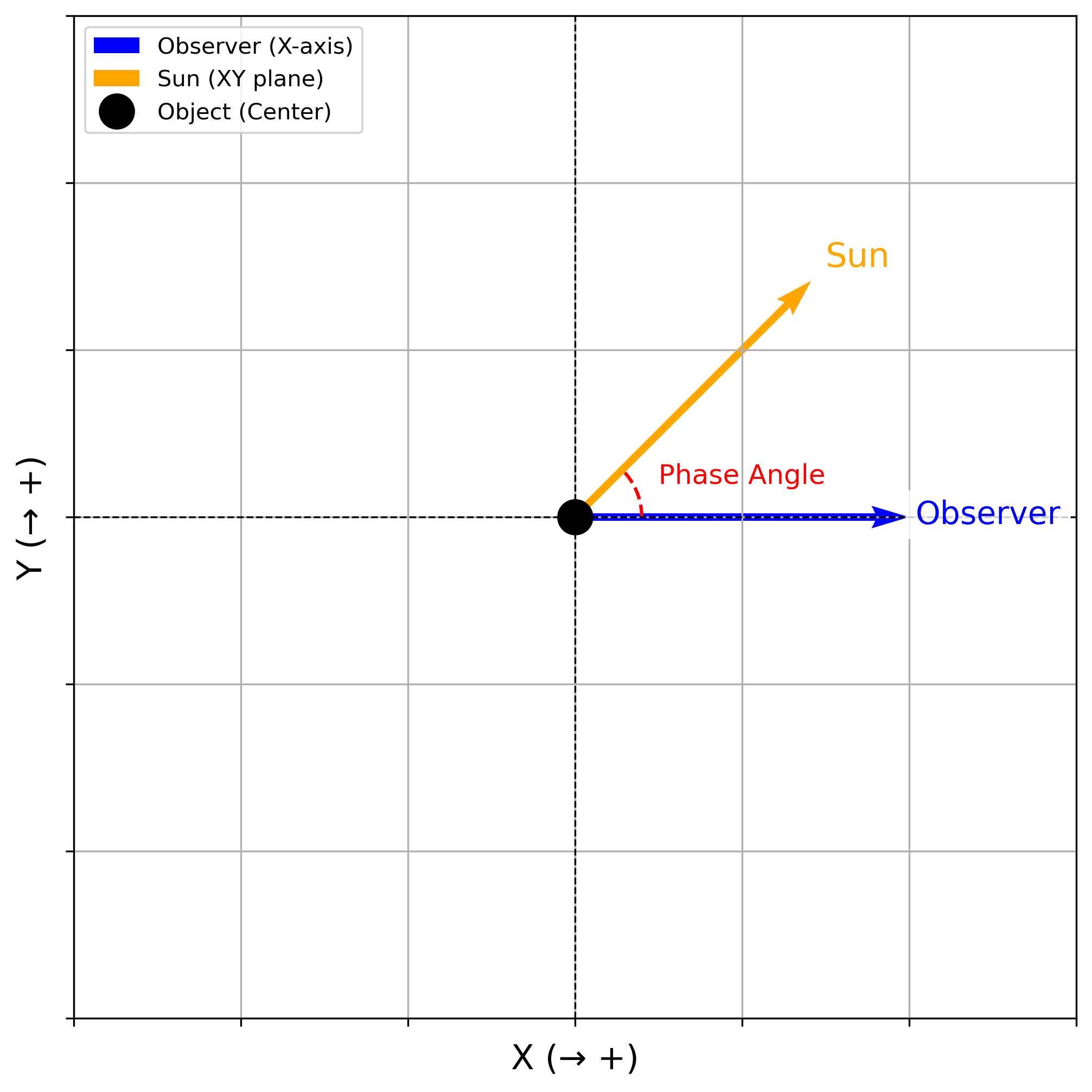
Phase Angle: The phase angle is the angle formed between the vector pointing toward the Sun and the vector pointing toward the observer. In this mode, Earth (observer) is fixed along the X-axis of this arbitrary coordinate system, the object is located at the origin, and the Sun moves according to the angle specified by the user within the XY plane (from the X-axis toward the Y-axis, see Fig. 1). In case the check box Generate Images is selected, the positive Z-axis points upward, while the positive Y-axis is oriented to the right in the image.
Rotation Pole: In this mode, Earth (observer) is fixed at the origin and lies
on the
XY plane, with Y = 0,
as illustrated in Fig. 1. The pole is defined using spherical coordinates in
this arbitrary
frame. A pole at longitude = 0° and latitude = 90° corresponds to an
"equator-on"
configuration,
while a pole at longitude = 0° and latitude = 0° corresponds to a
"pole-on"
configuration. Once defined, the rotation sense follows the right-hand rule.
Common Input Parameters for the Rotational Light Curves
LC number of points: This parameter defines the temporal resolution of the rotational light curve. It specifies the number of points sampled across one full rotation. The tool currently supports up to 360 points, corresponding to 1° phase increments. For exceptional cases requiring higher resolution, please contact the developer.
Rotational phase offset: A rotational phase offset, ranging between 0 and 1, can be applied to adjust the starting point of the light curve. This adjustment ensures that the curve begins at a specific phase, such as a maximum, minimum, or any other desired point.
Shape Model
Custom Shape Model: A custom shape model can be uploaded in .obj
format, with
facets required to be triangular for compatibility.
It is recommended to use Blender, a free
and
versatile software, to create and export models in the appropriate format for this tool.
Models with a higher number of facets will result in longer computation times, and it is
recommended not to
exceed 3000 facets. In this video,
the user can
find a
basic example of how to generate a shape model.
It is important to specify that the forward axis is set to Y and the up axis is set to Z before
exporting.
Otherwise, an undesired orientation may occur.
An example of a shape model in the required format can be downloaded at
this link.
Triaxial Ellipsoid: A triaxial ellipsoid composed of 642 triangular facets can be generated by specifying the values of the axes a, b, and c. The shape model generated through this process will be included in the download folder.
Photometric Model
Radiance represents the intrinsic brightness of an object, independent of the observation
distance or
measurement instrument, but dependent on the photometric angles of phase (α),
emission
(e), and incidence (i). It is quantified as energy per unit area,
solid angle, and
time. However, for small bodies reflecting sunlight, it is often more practical to consider the
ratio
between incident and reflected energy. A commonly used term for this is I/F, which
represents the
ratio of reflected light to that of a perfectly Lambertian surface under the same illumination
conditions.
In this tool, several photometric models are implemented. On the one hand, we use empirical
models, assuming
that radiance can be expressed as the product of two components: a phase function
(f(α)) and a
disk function (d(α,e,i)). This approach allows the simulation to separately account
for the
effects of the Sun-object-observer geometry (phase angle) and the surface scattering properties
of the
object.
$$\frac{I}{F} = f(\alpha) \; d(\alpha, e, i)$$
On the other hand, we implement the Hapke model (Hapke 2012). This model is significantly more
complex than
empirical models but has the advantage that its parameters have a physical meaning (or at least
that's what
it's supposed to be), making them more
intuitive and applicable in scientific studies.
For simplicity, the solar irradiance (S) received by the object is normalized to 1
W/m². This
assumption facilitates rescaling of the results if needed.
The currently implemented and functional models are as follows:
Empirical models:
Phase functions
-
No phase function: Assumes no dependence on the phase angle:
$$f(\alpha) = 1$$
-
Minnaert: Assumes a dependence as follows:
$$ f(\alpha) = A_{\text{min}} \; \pi \; 10^{-0.4 (\beta \alpha + \gamma \alpha^2 + \delta \alpha^3)} $$
whereAmin,β,γ, andδare fitting parameters (these parameters must be derived using degrees,not radians).
Disk functions
-
Lambertian: Assumes isotropic scattering given by:
$$d(i) = \frac{\cos i}{\pi}$$
-
Lommel-Seeliger: Models as:
$$ d(e, i) = \frac{\cos i}{\cos i + \cos e} $$
-
Minnaert: Dependence on incidence and emission, parameterized through the
parameter
k:
$$ d(e, i) = \cos^k (i) \; \cos^{k-1} (e) $$
Hapke model:
The Hapke model is based on radiative transfer theory and provides a more intuitive and interpretable approach to surface scattering. The model accounts for multiple scattering, macroscopic roughness, and opposition effects, which improve the accuracy of brightness predictions for irregular and granular surfaces. The reflectance in the Hapke model used in this tool, which depends on 9 parameters, is given by:
$$ \frac{I}{F} = LS(i, e) \; K \; \frac{w}{4} \left[ p(\alpha)(1 + B_{S0} B_{S}(\alpha)) + M(i, e) \right] \left[ 1 + B_{C0} B_{C}(\alpha) \right] S(i, e, \psi) $$
where:
LS(e, i)is the Lommel-Seeliger function.Kis the porosity factor, accounting for voids between particles in the surface.wis the single-scattering albedo, representing the fraction of incident light scattered by a single particle.p(α)is the phase function.BS0is the amplitude of the Shadow Hiding Opposition Effect (SHOE).BS(g)is the SHOE function.M(i,e)is the Isotropic Multiple-Scattering Approximation (IMSA).BC0is the amplitude of the Coherent Backscatter Opposition Effect (CBOE).BC(α)is the CBOE function.S(e, i, ψ)represents the macroscopic roughness correction, accounting for large-scale variations in the surface slope, whereψis the azimuthal angle between the planes of incidence and emission:
$$ \psi = \arccos \left( \frac{\cos(α) - \cos(e) \cos(i)}{\sin(e) \sin(i)} \right) $$
Each term of the above equation is calculated as:
-
Lommel-Seeliger function (
LS(e, i)):$$LS(e, i) = \frac{\cos i}{\cos i + \cos e}$$
-
Porosity factor (
K):$$ K = \frac{-\ln (1 - 1.209\phi^{2/3})}{1.209\phi^{2/3}} $$
whereΦis the filling factor, equivalent to 1 - porosity. -
Phase function (
p(α)), we employ the Henyey-Greenstein double-lobed single particle phase function:$$ p(α) = \frac{(1 + c_{HG})}{2} \; \frac{(1 - b_{HG}^2)}{(1 - 2b_{HG} \cos α + b_{HG}^2)^{3/2}} + \frac{(1 - c_{HG})}{2} \; \frac{(1 - b_{HG}^2)}{(1 + 2b_{HG} \cos α + b_{HG}^2)^{3/2}} $$
wherebHG(0 ≤bHG≤ 1) is the shape-controlling parameter, andcHG(−1 ≤cHG≤ 1)is the relative strength of backward and forward lobes. -
SHOE function, or Shadow Hiding Opposition Effect:
$$ B_S(α) = \frac{1}{1 + \tan(α/2)/h_S} $$
wherehSis the angular width parameter of SHOE. -
Isotropic Multiple-Scattering Approximation (IMSA):
$$ M(i, e) = H\left(\frac{\cos(i)}{K}, w\right) H\left(\frac{\cos(e)}{K}, w\right) - 1 $$
whereH(x,w)is the Ambartsumian-Chandrasekhar H function, which can be approximated as:$$ H(x, w) \approx \left\{ 1 - w x \left[ r_0 + \frac{1 - 2 r_0 x}{2} \ln \left(\frac{1 + x}{x}\right) \right] \right\}^{-1} $$
wherer0is the diffusive reflectance, given by$$ r_0 = \frac{1 - \sqrt{1 - w}}{1 + \sqrt{1 - w}} $$
-
Coherent Backscatter Opposition Effect function:
$$ B_C(\alpha) = \frac{1 + \frac{1 - \exp(-\tan(\alpha/2) / h_C)}{\tan(\alpha/2) / h_C}}{2 \left[ 1 + \tan(\alpha/2) / h_C \right]^2} $$
wherehCis the angular width of CBOE. -
Shadowing function \( S(i, e, \psi) \), which is function of
θp, the effective value of the photometric roughness, and given by:- if
i ≤ e:$$ S(i, e, \psi) = \frac{\mu}{\eta(e)} \frac{\mu_0}{\eta(i)} \frac{\chi({\theta}_p)}{1 - f(\psi) + f(\psi) \chi({\theta}_p) [\mu_0 / \eta(i)]} $$
with$$ \mu_{0} = \chi({\theta}_p) \left[ \cos(i) + \sin(i) \tan({\theta}_p) \frac{\cos(\psi) E_2(e) + \sin^2(\psi/2) E_2(i)}{2 - E_1(e) - (\psi/\pi) E_1(i)} \right] $$
$$ \mu = \chi({\theta}_p) \left[ \cos(e) + \sin(e) \tan({\theta}_p) \frac{E_2(e) - \sin^2(\psi/2) E_2(i)}{2 - E_1(i) - (\psi/\pi) E_1(i)} \right] $$
- if
e < i:$$ S(i, e, \psi) = \frac{\mu}{\eta(e)} \frac{\mu_0}{\eta(i)} \frac{\chi({\theta}_p)}{1 - f(\psi) + f(\psi) \chi({\theta}_p) [\mu / \eta(e)]} $$
with$$ \mu_{0} = \chi({\theta}_p) \left[ \cos(i) + \sin(i) \tan({\theta}_p) \frac{E_2(i) - \sin^2(\psi/2) E_2(e)}{2 - E_1(i) - (\psi/\pi) E_1(e)} \right] $$
$$ \mu = \chi({\theta}_p) \left[ \cos(e) + \sin(e) \tan({\theta}_p) \frac{\cos(\psi) E_2(i) + \sin^2(\psi/2) E_2(e)}{2 - E_1(i) - (\psi/\pi) E_1(e)} \right] $$
e and
i values, as follows:
$$ \chi({\theta}_p) = \frac{1}{\sqrt{1 + \pi \tan^2({\theta}_p)}} $$
$$ \eta(y) = \chi({\theta}_p) \left[ \cos(y) + \sin(y) \tan({\theta}_p) \frac{E_2(y)}{2 - E_1(y)} \right] $$
$$ E_1(y) = \exp \left[ -\frac{2}{\pi} \cot({\theta}_p) \cot(y) \right] $$
$$ E_2(y) = \exp \left[ -\frac{1}{\pi} \cot^2({\theta}_p) \cot^2(y) \right] $$
$$ f(\psi) = \exp \left[ -2 \tan \left( \frac{\psi}{2} \right) \right] $$
To use the Hapke model in this tool, the following 9 parameters are required:
| Parameter | Description |
|---|---|
w |
Single scattering albedo |
bHG |
Henyey-Greenstein parameter |
cHG |
Henyey-Greenstein parameter |
BC0 |
Amplitude of the Coherent Backscatter Opposition Effect (CBOE) |
hC |
Angular width of CBOE |
BS0 |
Amplitude of the Shadow Hiding Opposition Effect (SHOE) |
hS |
Angular width of SHOE |
θp |
Photometric roughness (degrees) |
Φ |
Filling factor, equivalent to 1 - porosity |
Albedo Spot
The Albedo Spot checkbox allows users to simulate surface features with different reflectance properties (albedo) on the surface. This feature is particularly useful for studying the effects of localized surface variations on the rotational light curve.
When this checkbox is enabled, the user can define the following parameters:
- Albedo variation (%): Specifies the percentage reduction in reflectance for the selected spot. For example, a value of 20% reduces the reflectance by 20% compared to the surrounding surface.
- Latitude range: Defines the minimum and maximum latitudes (in decimal degrees) where the albedo spot is located.
- Longitude range: Defines the minimum and maximum longitudes (in decimal degrees) where the albedo spot is located.
By adjusting these parameters, users can model and analyze how surface heterogeneities influence the rotational light curve of the object.
Precession
The Precession checkbox allows users to simulate the motion of the rotation pole as it precesses over time. Instead of remaining fixed, the rotation pole follows a conical trajectory, modifying its longitude and latitude dynamically during the simulation.
When this checkbox is enabled, the user can define the following parameters:
- Amplitude Lat (°): The maximum variation of the rotation pole's latitude due to precession. A higher value results in a more pronounced inclination change.
- Amplitude Lon (°): The maximum variation of the rotation pole's longitude due to precession. This determines how much the pole drifts in the longitude direction.
- Precession freq. (cycles per body rotation): Defines how many full precession cycles occur per complete rotation of the body. A frequency of 1 means the pole completes one full precession cycle for every full rotation.
The precession is modeled using sinusoidal variations for both the longitude and co-latitude of the pole:
$$ \text{lon} = \text{lon}_{0} + A_{\text{lon}} \; \cos\!\left( 2\pi \, \omega_{p} \, t \right) $$
$$ \text{colat} = \text{colat}_{0} + A_{\text{colat}} \; \sin\!\left( 2\pi \, \omega_{p} \, t \right) $$
Where:
lon0andcolat0are the initial longitude and colatitude of the pole.AlonandAcolatdefine the amplitude of the precession in longitude and colatitude .ωpis the precession frequency in cycles per body rotation.trepresents the rotational phase, varying from 0 to 1 over a full rotation.
By adjusting these parameters, users can simulate different precession behaviors, from small oscillations to large variations where the rotation pole traces a wide circular path over time.
Check Boxes
The tool includes the following checkboxes to customize the output:
- Generate Images: Enables the generation of projected images for the object in addition to the light curve. These images can be used for visualization or further validation purposes.
- Self-shadowing: Includes the effect of self-shadowing in the simulation, which considers how different parts of the object's surface may block sunlight. Be aware that enabling this option can significantly increase computation time.
Occultation Module
This Occultation mode builds upon the functionalities described above and is specifically designed for direct application in the context of stellar occultations. Given the MPC designation of the target body, its sidereal rotation period (in hours), and the orientation of its spin axis, the tool automatically computes the rotational phase for a user-specified date corresponding to a predicted stellar occultation, using the reference epoch t0 (in JD) associated with a photometric light-curve maximum. Additionally, the app generates the projected figure of the body at that rotational phase, allowing direct visualization of its orientation at the occultation epoch. As in other modes, users may also upload a custom shape model in.obj format or define the
principal axes of an ellipsoid.
A major advantage of this tool is that it enables the exploration of viewing-geometry variations across different dates. Since the on-screen output is rendered to scale, users can empirically determine the expected dimensions along any given direction and directly compare them with the observed occultation chords.
Output
The web interface provides a complete summary of all the parameters used in each simulation.
If the Generate Images checkbox is selected or the Known and Generic modes, an animated GIF is displayed showing the projected shape of the object on the sky plane. For the Occultation mode, the interface also displays the rotational phase of the object at the inserted occultation date, along with the corresponding projected figure.
The colors of the surface facets reflect the solar incidence angle, with red indicating lower values (more irradiated areas) and blue indicating higher ones. The white arrow corresponds to the orientation of the rotation pole at the time of the observation. A scale bar is shown in the bottom-right corner, and the default units of the tool are kilometers.
In the Known and Generic modes, the synthetic light curve in relative magnitude is also displayed, computed as:
$$ \text{Relative magnitude} = -2.5 \log_{10} \left( \text{RADF} / \overline{\text{RADF}} \right)$$
where RADF is the sum of the radiance factor from all facets at a given rotational
phase, and
RADF
is the average radiance factor.
By clicking the Download Files button, a ZIP archive is generated and downloaded to the user’s local machine. This archive contains:
- All generated projection images, each named with the corresponding rotational phase.
- The synthetic light curve as
synthetic_LC.png. - The shape model in
.objformat (if axes a, b, and c were provided). - The animated projection GIF (when Generate Images was selected).
- A plain text file named
output.datwith the computed numerical results:- Column 1: rotational phase
- Column 2: RADF
- Column 3: relative magnitude (as defined above)
Similarly, in the case of the Occultation mode, the user can download a ZIP file
containing the
projected image for the occultation date, the shape model in .obj format, and the
output.dat file with all the data corresponding to this case.
Acknowledgements
How to cite
Rizos, J. L., Ortiz, J. L., Gutiérrez, P. J., Navajas, I. M., & Lara, L. M. (2025).
An open-access web tool for light curve simulation and analysis of small Solar System objects.
Astronomy & Astrophysics. https://doi.org/10.1051/0004-6361/202556525